Flapbot : une structure élémentaire pilotable à distance
Quelle est la structure la plus simple qui puisse être imaginée pour construire un robot capable d’explorer une surface horizontale ? Une réponse à cette question vient d’être proposée sous la forme d’une structure flexible qui exploite les lois physiques de la friction solide.
Les robots flexibles sont une classe de robots qui misent sur des stratégies de déformation de leur structure afin d’éviter l’utilisation de pièces articulées plus complexes. L’intérêt de cette approche est que les mécanismes de déformation des robots flexibles reposent sur l’actionnement de structures à la géométrie relativement simple, ce qui permet d’établir des mécanismes robustes, miniaturisables et réplicables en grand nombre. Dans un contexte de locomotion robotique, on pourrait citer l’exemple de structures élastiques allongées avec des cavités qui sont successivement gonflées et dégonflées, ce qui donne lieu à un mouvement rampant similaire celui d’un asticot. Néanmoins, la nécessité de relier physiquement l’objet à déplacer à un mécanisme d’actionnement, que ce soit un cycle d’air comprimé comme pour l’exemple mentionné ou quelque chose d’autre, limite de façon importante l’autonomie de ces systèmes robotiques flexibles.
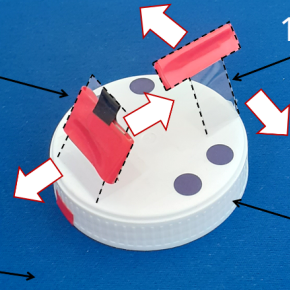
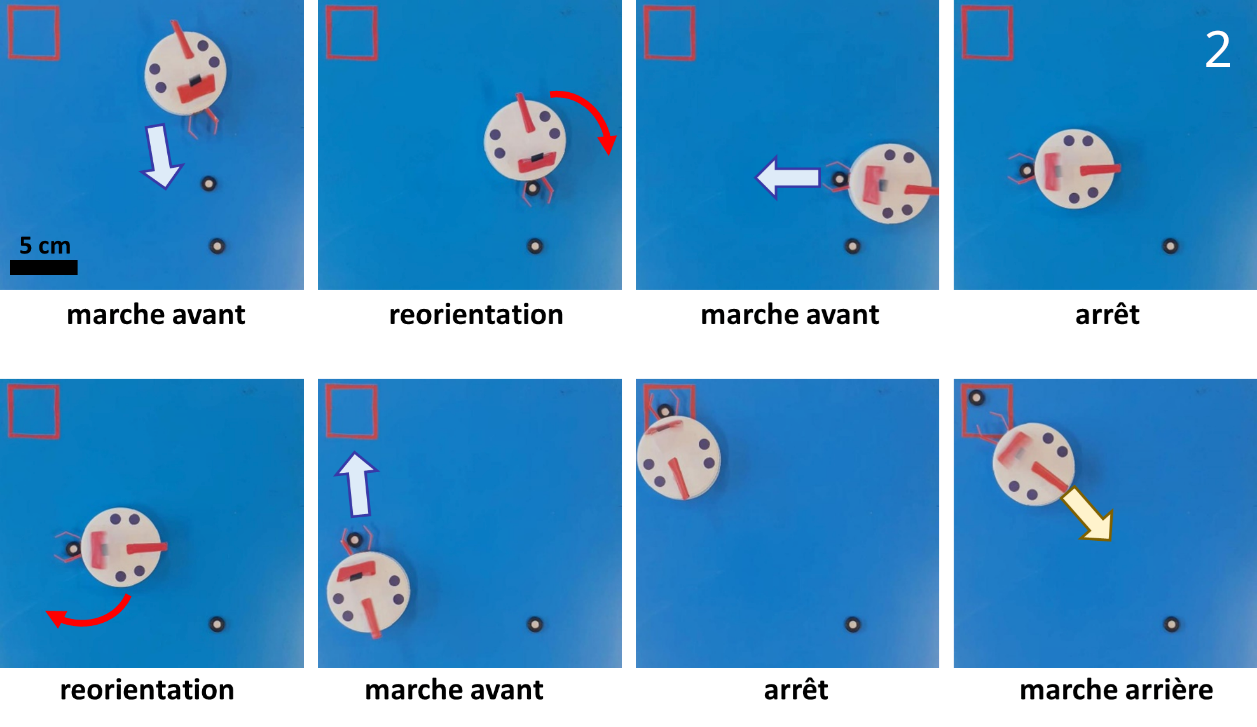
Pour dépasser ces limitations, une stratégie permettant de déplacer de manière contrôlée un robot flexible non raccordé vient d’être développée lors d’une collaboration entre le Laboratoire Ondes et Matière d’Aquitaine (LOMA, CNRS / Université de Bordeaux) et l’Institut des Sciences du Mouvement (ISM, CNRS / Université Aix-Marseille). La structure qui a été développée se compose d’un support rigide sur lequel sont collées deux plaques flexibles distinctes (voir figure). Ce dispositif est placé sur un plaque horizontale rigide qui peut être mise en vibration verticale via un pot vibrant selon une amplitude et une fréquence de vibration qui sont contrôlées par l’opérateur. Le dispositif est en contact frictionnel avec le support et lorsque l’amplitude de la vibration du support est faible ou nulle, le dispositif est statique. Lorsque l’amplitude de la vibration est plus importante, une mise en mouvement horizontale du robot flexible est observée par une succession de courtes phases de glissement. Plus précisément, quatre plages de fréquence ont été identifiées : une plage de fréquence permettant d’obtenir un mouvement de glissement vers l’avant, une plage de fréquence pour un mouvement vers l’arrière et deux autres plages de fréquence permettant de faire pivoter vers la gauche ou vers la droite. Ces résultats ouvrent la voie à la conception d’éléments robotisés mobiles à la structure extrêmement simple, garantissant un mécanisme de locomotion robuste. Ils sont publiés dans les Physical Review Letters.
Référence
Controlled locomotion of a minimal soft structure by stick-slip nonlinearity, T. Barois, A. Boucherie, L. Tadrist et H. Kellay, Physical Review Letters, publié le 6 décembre 2024.
Doi : 10.1103/PhysRevLett.133.238301
Archive ouverte : HAL